
CV / Google Scholar / GitHub
I am currently a second-year Ph.D. student in Robotics at Tohoku University, advised by Prof. Mitsuhiro Hayashibe.
Before joining academia, I worked as an automotive manufacturing engineer. I am now conducting research in robotics.
My research interests include embodied AI, robotic manipulation, multimodal learning in robotics, deformable object manipulation, and the industrial applications of robotics.
My long-term goal is to enable human-like perception and manipulation in robots to contribute to a better world.
Email: gu.ningquan.t1@dc.tohoku.ac.jp
Office: 503, Mechanical and Intelligent Systems Joint Building (A15), Aoba-ku Sendai, Japan.
Updates
- July 2025 A paper accepted for publication in IEEE Robotics and Automation Letters 2025
Publications
Ningquan Gu; Kazuhiro Kosuge; Mitsuhiro Hayashibe
IEEE Robotics and Automation Letters 2025
Webpage •
Paper •
Ningquan Gu; Ruhan He; Lianqing Yu
IEEE Robotics and Automation Letters 2024
Webpage •
Paper •
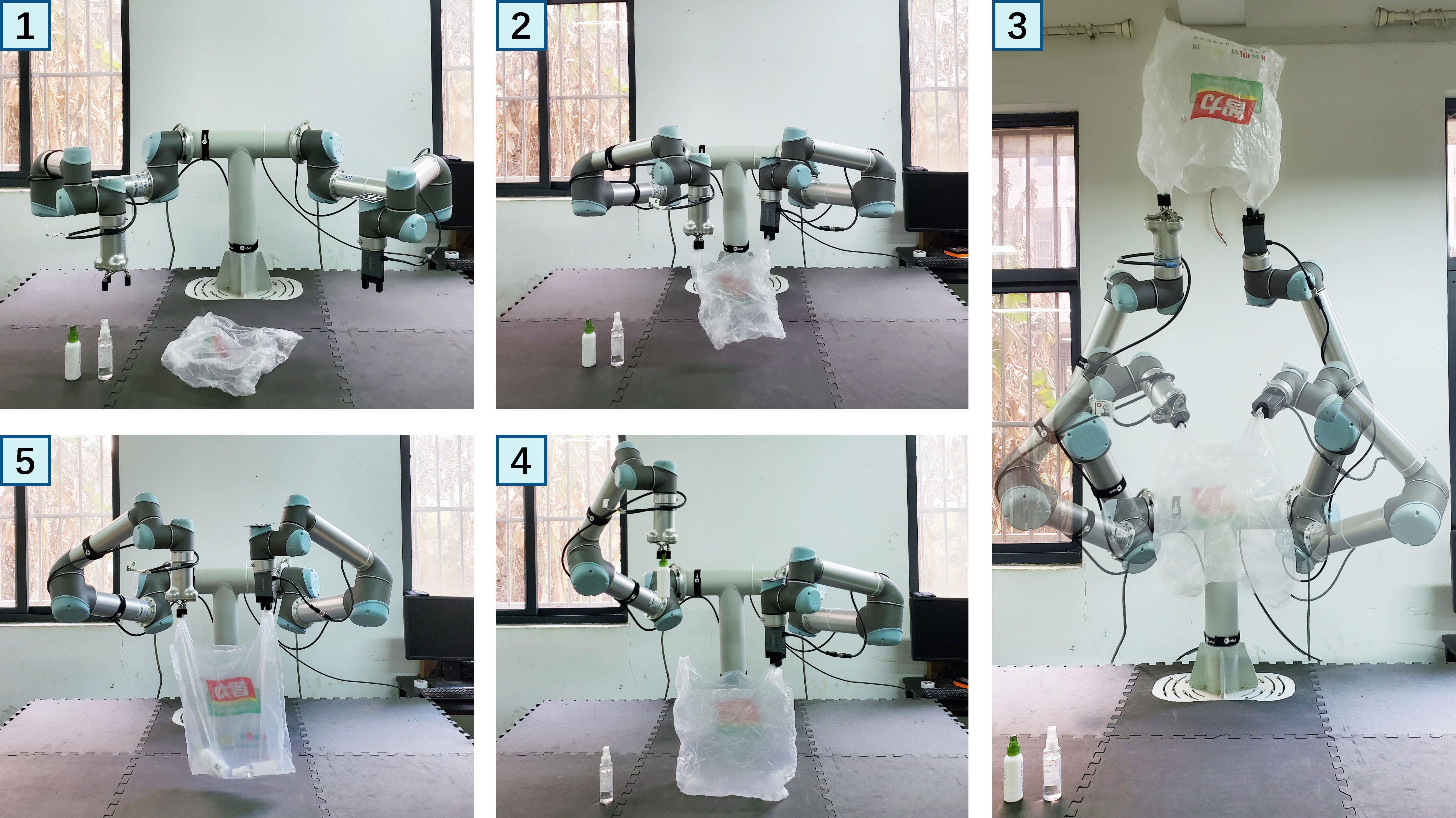 ShakingBot: Dynamic Manipulation for Bagging
ShakingBot: Dynamic Manipulation for Bagging
Ningquan Gu; Zhizhong Zhang; Ruhan He; Lianqing Yu
Robotica (Cover Article) 2024
Paper •
Under Review
Ningquan Gu; Yuquan Li; Kazuhiro Kosuge; Mitsuhiro Hayashibe
Under review by the Fourteenth International Conference on Learning Representations (ICLR 2026)
Webpage •
Ningquan Gu; Kazuhiro Kosuge; Mitsuhiro Hayashibe
Under review by the Transactions on Industrial Informatics
Webpage •